





For decades, robotics has been stuck in the same loop: robots could only copy human demonstrations. This approach, known as behavior cloning, required vast amounts of labeled data where machines essentially mimicked recorded human actions. The problem? These datasets are expensive to collect, and once the robot encounters something even slightly different, it breaks down.
Now, Google DeepMind is rewriting the rulebook. Drawing inspiration from the way large language models (LLMs) are fine-tuned, DeepMind researchers propose a two-stage “post-training” framework that allows robots not just to imitate, but to learn, adapt, and grow.
The results, tested on both simulated and real robots such as LanguageTable and Aloha, show something remarkable: robots can teach themselves new skills beyond what was ever present in their training data. This marks a real step toward robots that grow like humans, learning through exploration rather than endless datasets.
📄 Read the full academic paper on arXiv (PDF)
The Two-Stage Framework: From Imitation to Self-Improvement
DeepMind’s system introduces a clear structure for teaching robots:
-
Supervised Fine-Tuning (SFT)
The robot starts with a pretrained foundation model, then learns through imitation (behavior cloning) and steps-to-go prediction—essentially anticipating the sequence of actions needed. -
Self-Improvement
With a smooth reward function and automated success detection, the robot can now practice tasks with minimal human oversight. It explores, fails, corrects itself, and gradually masters new skills.
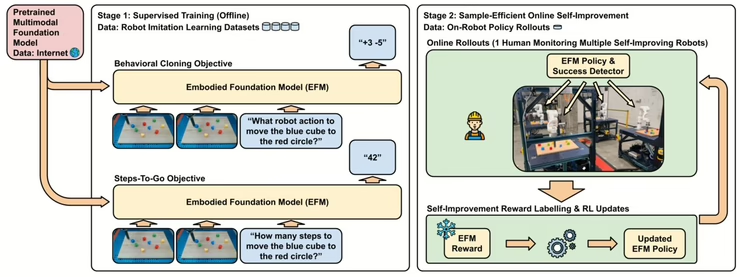

The genius here lies in the reward system. Traditionally, robotics research struggled with “reward engineering”—designing a reward function that captures success in the messy real world is nearly impossible. DeepMind’s data-driven rewards borrow robustness from foundation models, eliminating the need for handcrafted signals.
Why This Is a Breakthrough
DeepMind’s experiments highlight three big wins:
-
Efficiency Gains
Self-improvement beats brute force. For example, adding just 10% more self-improvement time raised success rates from 45% to 75%. By contrast, expanding the imitation dataset eightfold only lifted performance from 45% to 60%. -
Reliability Across Trials
The method proved stable in both simulated and real-world settings, where robots trained with smaller datasets were still able to refine and improve. -
True Generalization
The system achieved something new: behavioral generalization. Unlike semantic generalization (understanding variations of a concept), robots here learned new motor skills they had never seen before.
Case Studies: Robots in Action
🔹 LanguageTable
-
Robots trained with millions of human demonstrations successfully carried out “Block2Block” tasks—like moving a blue moon-shaped block onto a red pentagon.
-
Experiments showed strong transfer from simulation to the real world (Sim2Real) and even in reverse (Real2Sim).
🔹 Aloha Platform
-
A dual-arm robot mastered the complex task of inserting a pin into a sleeve, despite a smaller dataset and high-dimensional action space.
-
Success required innovative reward definitions since cameras couldn’t always verify if the pin was fully inserted.
🔹 BananaTable Challenge
-
Perhaps the most exciting result: robots trained on block manipulation learned to handle bananas, a completely new task requiring fresh motor strategies.
-
Instead of failing when faced with unexpected object geometry, the robots discovered ways to adjust their movements—proof of genuine skill acquisition.
The Road Ahead: Toward Autonomous Robotic Growth
This research hints at a paradigm shift: robots moving from passive imitators to active learners. The combination of foundation model pretraining and online self-improvement unlocks new abilities:
-
Learning Beyond Human Datasets – robots gain new behaviors never demonstrated.
-
On-the-Job Training – machines can adapt in warehouses, factories, or homes without requiring engineers to rewrite code.
-
Cross-Domain Generalization – from blocks to bananas, robots show potential to transfer skills across very different tasks.
Yet challenges remain. DeepMind researchers note:
-
Data Labeling Costs – segmenting skill boundaries at scale is still costly.
-
Reward Fidelity – delays in reward inference could benefit from even larger models.
-
Over-Optimization Risks – without better stopping rules, robots sometimes regress after peak performance.
-
Algorithm Choice – current methods avoid data reuse, leaving room for more efficient offline learning.
Why It Matters Beyond Robotics
This study is more than a robotics milestone. It’s part of a bigger trend: the foundation model revolution moving from language to vision, and now into embodied AI. Just as ChatGPT transformed natural language, DeepMind’s research could transform how machines interact with the physical world.
Robots that can self-train may be the missing link toward household assistants, smarter factory automation, and even healthcare robotics.
And for AI-watchers, this aligns with what’s trending now on Google: surging interest in “autonomous robots,” “DeepMind AI,” and “robot self-learning.”





